
dToF vs. iToF LiDAR: Key Differences and Use Cases
Advertisement
Introduction : There are two primary ways light is used to measure distance in LiDAR which include Direct Time of Flight (dToF) and Indirect Time of Flight (iToF).
While both technologies rely on the speed of light, they use very different physical principles to calculate the “time” component.
Direct Time of Flight (dToF) LiDAR
It is the most intuitive approach and is frequently used in long range applications like autonomous driving. It functions just like “stopwatch”.
- The system fires a short, powerful pulse of laser light. At the exact microsecond the pulse leaves the emitter, a timer starts. When the light hits an object and reflects back, the sensor (usually a SPAD or SiPM) stops the timer.
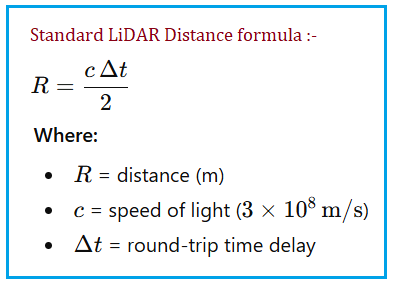
- Distance (D) or Range (R) can be measured as we know speed of light (c) and round trip time delay.
- Benefits : dToF is exceptionally good at long ranges because it can distinguish a single pulse from background solar noise. It can also detect “multiple echoes”. For example, seeing a pedestrian through a glass window or through heavy rain.
Indirect Time of Flight (iToF) LiDAR
Instead of timing a single pulse, it measures the properties of a continuous wave of light. The iToF is the phase-shift method. This is common in consumer electronics, like smartphone face ID or indoor robotics.
- The system emits a continuous, modulated wave of light (often a sine wave). Instead of a stopwatch, the sensor compares the phase of the outgoing wave with the phase of the reflected wave. The “shift” or delay between these waves tells the system how far the light traveled.
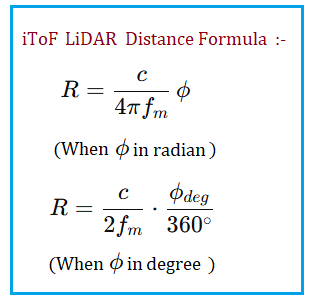
- The distance is calculated based on the phase difference relative to the modulation frequency of the light.
- benefits : iToF sensors can be built using standard CMOS processes (similar to camera chips), allowing for very high resolution (i.e. megapixel depth maps) at a lower cost for short to medium distances.
Comparison between Direct Vs. Indirect Time of Flight (ToF) LiDAR
| Feature | Direct ToF (dToF) | Indirect ToF (iToF) |
|---|---|---|
| Measurement method | Measures travel time of a discrete pulse to determine distance of target | Measures phase shift of a continuous wave to determine target distance and velocity. |
| Optimal range | Long range | Short to medium range |
| Outdoor performance | Excellent, high immunity to sunlight | Moderate, can be drowned out by the sun |
| Resolution | Lower spatial resolution (Point clouds). | High spatial resolution (Depth images). |
| Power consumption | Higher peak power, lower average power. | Lower peak power, higher average power. |
| Complexity | Requires high precision timers (TDCs). | Requires complex signal processing for phase. |
| Multi-echo detection | Can see through rain, fog or glass. | Struggles with multi path interference. |
| Typical use case | self driving cars, drones, surveying | Face-ID, indoor vacuum robots, AR/VR etc. |
Summary
The choice between direct ToF Versus Indirect ToF LiDAR lies based on application or use case as follows.
- Choose dToF if you are building an outdoor system that needs to see hundreds of meters away, such as a long range drone or an autonomous vehicle. It is rugged, handles solar noise well, and provides high speed data for safety critical decisions.
- Choose iToF if you need high resolution 3D images for an indoor environment or close range interaction. It is perfect for gesture recognition, 3D room scanning or industrial robots working in controlled lighting.
Advertisement




