Difference between CAN Controller vs CAN Transceiver
Advertisement
Introduction : Although often mentioned together, a CAN controller and a CAN transceiver serve two distinct but complementary roles in a CAN bus network. Separating these functions allows for modular, flexible and standard compliant implementations of CAN networks. Let us compare both and explore difference between them.
CAN Controller
It is a digital logic device, often integrated directly into a microcontroller (MCU) or available as a standalone chip. Its primary responsibility is to handle the protocol level tasks of CAN communication. It offloads the complex, timing critical rules of the CAN protocol from the main CPU.
The key functions of a CAN controller are as follows.
- Message Framing: It takes data from the MCU (Micro-Controller Unit) and assembles it into a valid CAN frame as per its required fields.
- Message Buffering: It has dedicated memory buffers (i.e. mailboxes) to store outgoing messages before transmission and incoming messages after reception.
- Arbitration: When multiple nodes try to talk simultaneously, the controller follows bit wise arbitration process to determine which message has priority to transmit without corrupting the data.
- Error Handling: It automatically detects different form of errors on the bus, signals them by sending an “Error Frame” and keeps track of its own error state (i.e. error active, error passive, bus off).
- Message Filtering: It can be programmed with acceptance filters to automatically ignore messages with identifiers that are not relevant to the node.
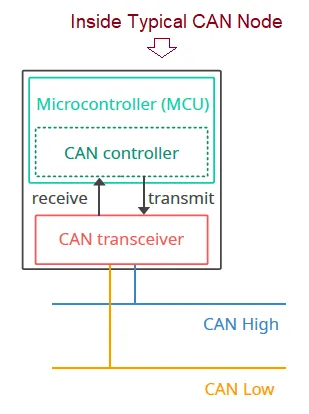
The CAN controller commnunicates with main CPU via standard interface such as SPI. It can send and receive single ended digital signals on its Tx and Rx pins.
CAN Transceiver
It is a physical layer device. It acts as bridge between digital world of CAN controller and electrical environment of physical CAN bus. It doesn’t understand CAN message contents, only the electrical levels.
The key functions of a CAN transceiver are as follows.
- On tranmission, it converts single ended digital signal into differential voltage across two wires, known as CAN_H and CAN_L.
- On reception, it continuously monitors voltage on CAN_H and CAN_L wires and converts the differential signal back into single ended digital signal.
CAN transceiver provides necessary electrical power to drive signals on the bus. It provides protection to CAN controller and MCU from any faults on the bus such as short circuits, electrostatic discharge (ESD), voltage spikes etc.
Key differences
| Feature | CAN Controller | CAN Transceiver |
|---|---|---|
| OSI model layer | Layer-2 (Data Link Layer) : Handles message framing, arbitration and error checking. | Layer-1 (Physical Layer) : Handles bit timing, voltage levels and physical connection to the wires. |
| Primary role | Protocol Management : Manages the rules, logic and framing of CAN messages | Physical Signaling : Converts signals between digital and electrical domains |
| Connection Interface | Connects to the main Microcontroller/CPU (via SPI, internal bus etc.) and to the Transceiver (via digital TX/RX pins). | Connects to the CAN Controller (via digital TX/RX pins) and to the physical CAN bus (via CAN_H/CAN_L pins). |
| Intelligence built-in | High, understands and enforces CAN protocol | Low, it has no knowledge of CAN protocol; it only converts voltage levels on its digital input |
| Signals handled by them | Digital Logic : Processes single ended digital signals (TTL/CMOS 1’s and 0’s) from/to the MCU. | Differential Analog : Creates and reads differential voltage signals on the CAN_H and CAN_L bus lines. |
Summary: CAN controller handles protocol logic where as CAN transceiver handles physical signalling. This separation maximizes flexibility, reliability and maintainability of embedded or automotive networks, while enabling compliance with CAN standards and optimal performance.