Active vs Passive CAN Error Frame : Key Differences
Distinguish between Active and Passive CAN error frames and their usage and how nodes respond to CAN bus errors.
Advertisement
Explore articles, explainers, and practical references focused on Automotive within Terminology.
Articles
45
Showing
1-25
Pages
1/2
More in Terminology
Jump across related topic clusters without losing your place.
Advertisement
Article Index
Showing 1-25 of 45 articles in this archive.
Distinguish between Active and Passive CAN error frames and their usage and how nodes respond to CAN bus errors.
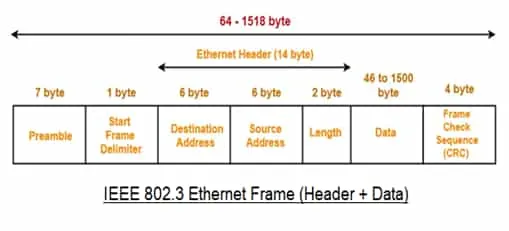
Perform in-depth Ethernet frame analysis for automotive systems. Capture, decode and monitor IP-based vehicle communication with ease.
Analyze CAN bus frames in real time with our advanced CAN packet data logger tool. Decode, log and visualize CAN network communication efficiently.
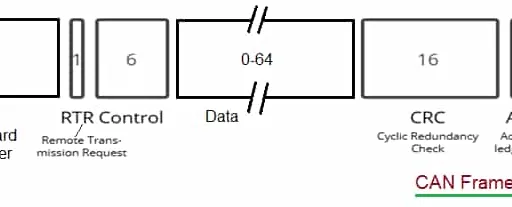
Learn about the Controller Area Network (CAN) protocol, its functionality, how it works, frame structure, error handling, and common error types in automotive and industrial applications.
Learn about CAN bus error types viz. bit errors, stuffing, CRC, ACK and form errors and how they impact message integrity.
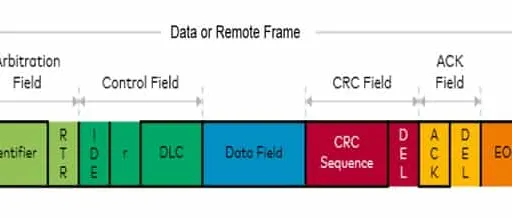
Explore the four CAN frame types viz. Data, Remote, Error and Overload frame and their roles in CAN bus communication and error handling.
Learn how CAN to Ethernet Gateway works including its applications and explore popular manufacturers.
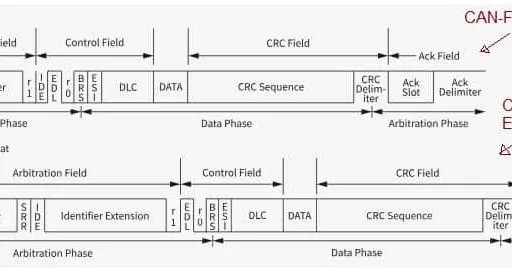
Explore the similarities and differences between CAN, CAN-FD, and CAN-XL protocols. Learn about data rates, payload sizes, and applications.
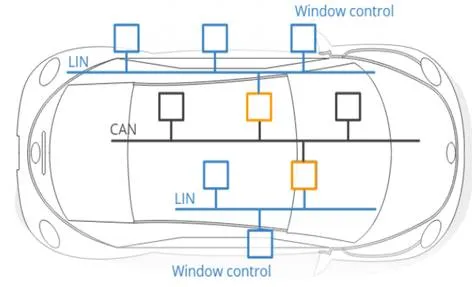
Explore the differences between CAN and LIN bus protocols in automotive and industrial applications, including speed, cost, and use cases.
Explore the key differences between CAN and CANopen protocols, essential for automotive and industrial automation, focusing on their layers, standardization, and applications.
Perform high-speed CAN-FD bus frame analysis with our CAN-FD packet data logger. Capture extended data fields and improve diagnostics accuracy.
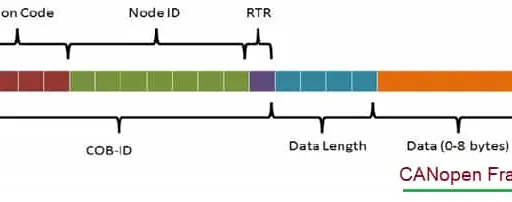
Perform in-depth CANopen bus frame analysis with our advanced packet data logger tool. Decode COB-IDs, SDO/PDO frames, identify node events and ensure robust network diagnostics.
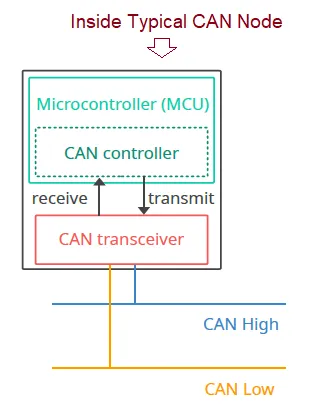
Compare CAN controller and CAN transceiver and explore difference between them with respect to functions, roles and why both are vital for CAN bus communication in vehicles or embedded systems.
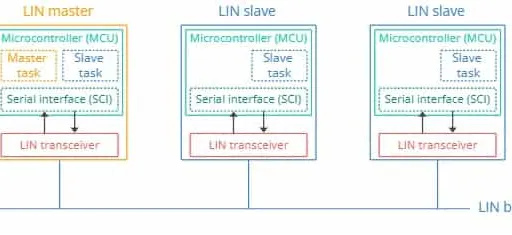
Compare CAN Transceiver and LIN transceiver and explore difference between them with respect to functions, roles and why both are vital for automotive communication in vehicles or embedded systems.
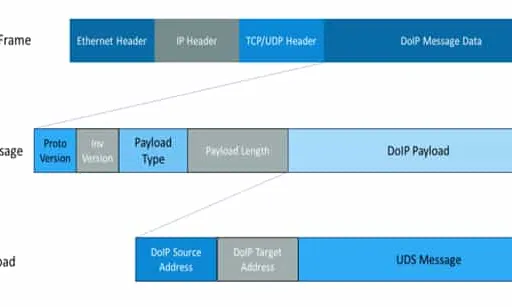
Analyze Diagnostics over IP (DoIP) frames using our intelligent packet data logger. Perfect for Ethernet-based vehicle diagnostics.
Learn the difference between dominant and recessive bits in CAN bus and how logic levels, arbitration and priority work in CAN communication.
Explore ESP32 Two Wire Automotive Interface (TWAI) Protocol features, its key benefits and comparison with CAN bus.
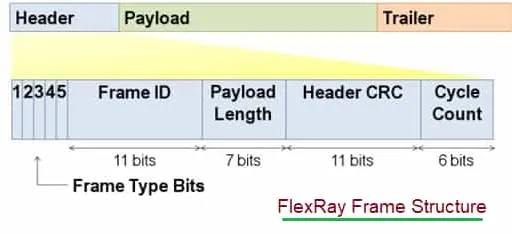
Explore deterministic automotive communication with FlexRay frame analysis. Log and decode data for time-critical vehicle networks.
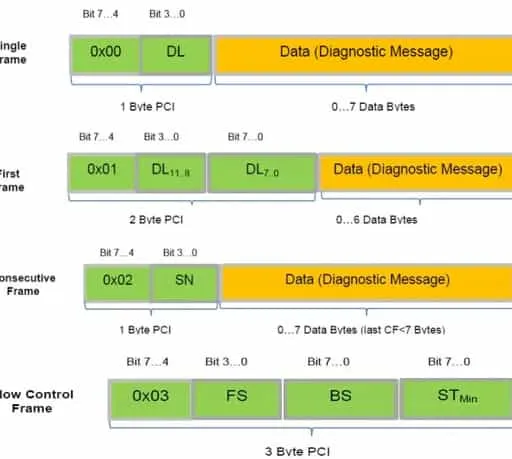
Analyze ISO-TP frames efficiently using our diagnostic software. Supports CAN message segmentation and reassembly.
Compare ISOBUS, NMEA 2000, and SAE J1939 protocols - understand their key differences, applications and compatibility in vehicle networks.
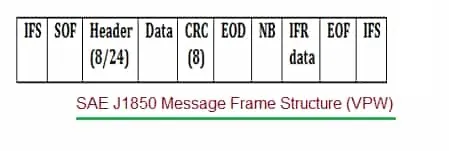
Analyze J1850 PWM and VPW frames with our automotive diagnostic tool. Ideal for legacy OBD-II communication systems.
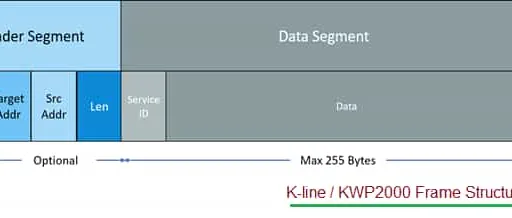
Decode and log K-Line bus communication with our diagnostic analyzer. Ideal for ISO 9141 and KWP2000 vehicle systems.
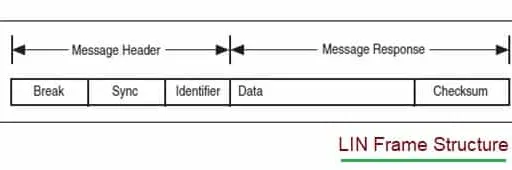
Decode and log LIN bus communication frames with precision. Our LIN packet analyzer simplifies master-slave network diagnostics.
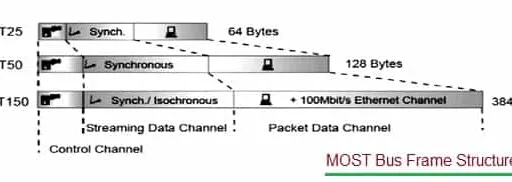
Analyze multimedia communication with our MOST bus frame analysis and packet logger. Decode control, synchronous, and asynchronous channels easily.
Decode SENT sensor communication with our protocol analyzer. Visualize nibble based frame structures in real time.
Advertisement