Difference between CAN Transceiver vs LIN Transceiver
Advertisement
Introduction : Both CAN and LIN transceivers are used in automotive domain. Though there are similarities between them, they are specifically targetted for different applications. Let us compare them and explore differences between them.
CAN Transceiver
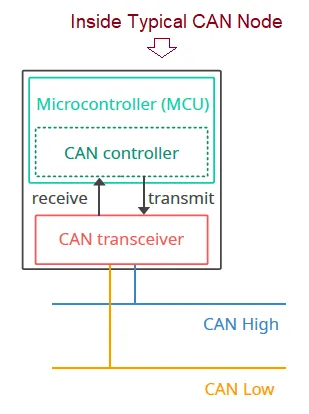
It is a physical layer device that connects a dedicated CAN controller to the two wire CAN bus. It is engineered for high speed, highly reliable and robust communication in electrically noisy environments. They are used for safety critical or performance sensitive applications such as engine control, braking or real time diagnostics.
The key functions of a CAN transceiver are as follows.
- Two wire differential signaling : It converts data from CAN controller which is in the form of 0’s and 1’s into suitable voltage for transmission on wires. For dominant bit (i.e. logic-0), it drives two lines with voltage difference of about 2.0V (e.g. CAN_H ~ 3.5V, CAN_L ~ 1.5V). For recessive bit (i.e. logic-1), it puts lines to high impedance state. Termination resistors bring them to almost same voltage of about 2.5V which results into almost no differential voltage across two wires.
- Noise immunity : Difference in voltage helps it to ignore common mode noise which makes CAN extremely robust.
- Multi-Master Communication : Any node on the CAN bus can begin transmission when bus is free.
- Speed : It supports high speeds ( Up to 1 Mbps for classic CAN and 5 Mbps or more for CAN FD).
- Protection : It offers high level of protection against bus faults such as shorting and ESD.
LIN Transceiver
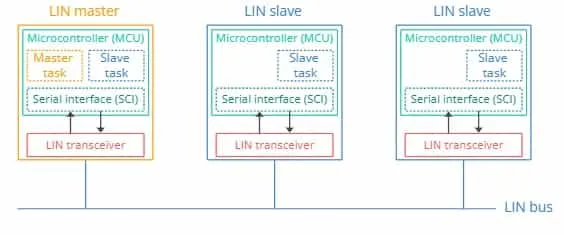
It is a physical layer device that connects a LIN controller (often a standard UART peripheral in a microcontroller) to the single wire LIN bus. It is designed for low cost, low speed communication. They are suitable for non critical, low bandwidth tasks such as window controls, seat adjustments, lighting or convenience systems.
The key functions of a LIN transceiver are as follows.
- Single Wire Communication: The most defining feature of LIN is its use of a single wire for communication (plus a ground reference).
- Signal Conversion: It converts the standard digital logic signals (e.g. 0V and 3.3V/5V) from a microcontroller’s TX/RX pins into the specific voltage levels required by the LIN bus.
- Master/Slave Operation: The LIN protocol is a Master/Slave network. The master node’s transceiver initiates all communication. Slave nodes only transmit when requested by the master.
- Slew Rate Control: The transceiver shapes the electrical signal’s rise and fall times to minimize EMI.
- Protection: It provides essential protection for the microcontroller against short circuits, high voltage and electrostatic discharge (ESD) on the bus line.
Key differences
| Feature | LIN Transceiver | CAN Transceiver |
|---|---|---|
| Physical Bus | single wire + Ground | Twisted pair of two wires (CAN_H and CAN_L) |
| Signaling method | Single ended, voltage on one wire is compared to the ground. | Differential, voltage difference between the two wires is measured. |
| Noise immunity | Lower, susceptible to ground shifts and common mode noise | Very high, excellent rejection of common mode noise. |
| Typical Speed | Low, Up to 20 Kbps | High, Up to 1 Mbps (Classic CAN) or 5+ Mbps (CAN-FD) |
| Network Topology | Master/Slave : only master can initiate communication | Multi-master, peer to peer : Any node can initiate communication |
| Underlying controller | Connects to a standard UART peripheral | Connects to a dedicated CAN controller peripheral |
| Cost | Lower cost per node. Simpler hardware | Higher cost per node. More complex hardware. |
| Typical application | Body electronics & Comfort : Windows, Mirrors, Seats, Climate control, sunroofs | Critical Systems : Powertrain (engine, transmission), chassis (ABS, stability control), safety (airbags) |
Summary: In many modern vehicles and embedded systems, CAN and LIN coexist with CAN handling the core control and diagnostics and LIN managing peripheral or convenience functions. Together, CAN and LIN based system delivers balanced, scalable and cost optimized network architecture.