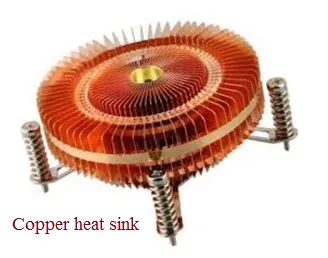
Copper vs. Aluminium Heat Sinks: Which is Better?
A comparison of copper and aluminum heat sinks, highlighting their key differences in thermal conductivity, cost, weight, and fabrication.
Advertisement
Browse the full Terminology archive with practical articles, guides, and reference material from RF Wireless World.
Articles
3508
Showing
526-550
Pages
22/141
Popular subtopics
Jump across related topic clusters without losing your place.
Advertisement
Article Index
Showing 526-550 of 3508 articles in this archive.
A comparison of copper and aluminum heat sinks, highlighting their key differences in thermal conductivity, cost, weight, and fabrication.
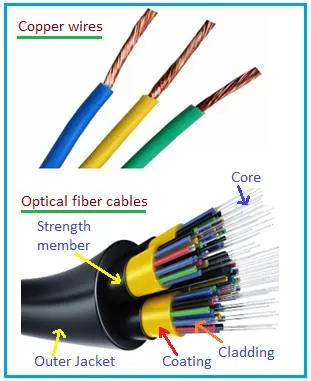
Explore the differences between copper and fiber optic cables for data communication, including their advantages, disadvantages, and applications.
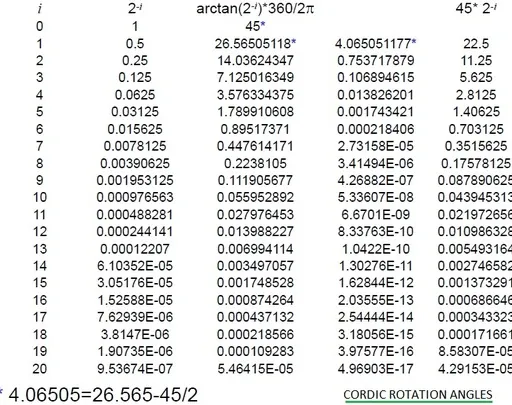
Learn the fundamentals of the CORDIC algorithm, its function for calculating trigonometric and hyperbolic functions, and common applications in signal processing.
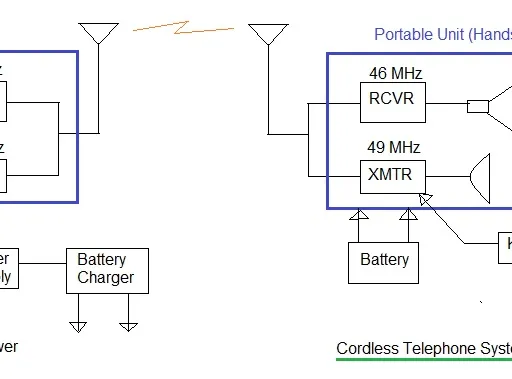
Explore the fundamentals of cordless telephone systems, including components, duplex communication, frequency allocations, and advanced systems.
Understand the distinctions between Intel Core i3, i5, and i7 processors, their features, and which is best for your computing needs and budget.
Explore the key differences between Intel Core i7 and Core i9 processors. Compare specifications, performance, and features to understand which CPU suits your needs.
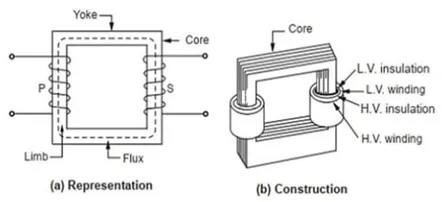
This article compares core and shell type transformers, highlighting their key differences in construction, application, and performance.
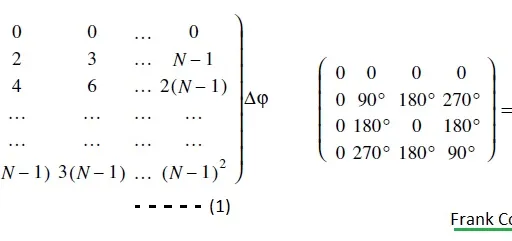
Comparison of Costas, Barker, and Frank codes as digital pulse compression techniques used in radar systems. Learn their advantages and disadvantages.
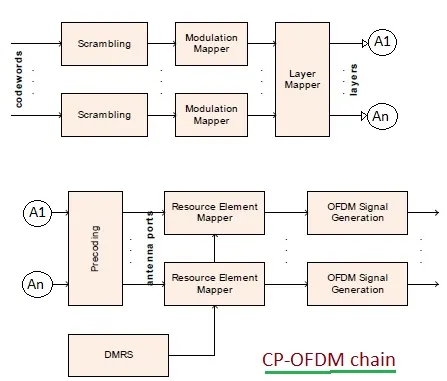
Explore the differences between CP-OFDM and DFT-S-OFDM waveforms in 5G NR, covering their usage, scenarios, and spectral efficiency.
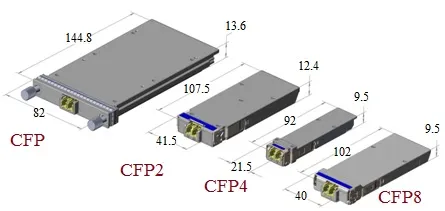
Explore the comparison between CPAK and CFP transceivers, highlighting their specifications, applications, and differences in size, power, and interface.

Explore the comparison between CPAK and QSFP28 transceivers, highlighting their differences in line rate, applications, dimensions, and electrical interface.
Understand the key differences between CPC, CPM, and CPA advertising models in Google Adsense to optimize your online advertising strategy as a publisher.
Understand the difference between CPI (Clock Cycles Per Instruction) and MIPS (Million Instructions Per Second) as performance metrics in computer architecture.
Understand CPRI line rates, including rates 1-10, line bit rates, coding, and transport capacity for WCDMA and LTE AxC.
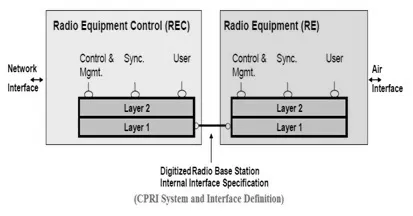
Compare CPRI vs eCPRI and explore the difference between CPRI and eCPRI as per architecture, advantages and applications in mobile communication.
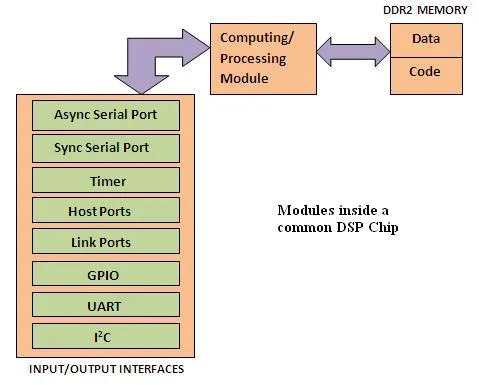
Explore the differences between CPUs, DSPs, and FPGAs, including their architecture, programming models, performance, and suitable applications.
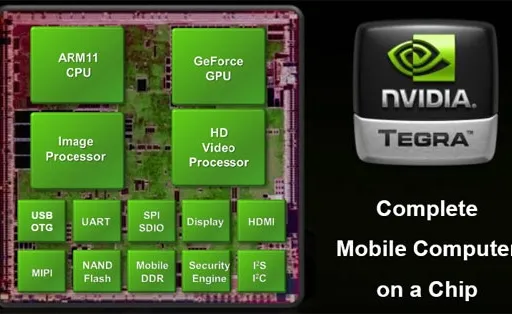
Explore the core differences between CPUs and GPUs, including their architectures, parallel processing capabilities, and application in SoCs.
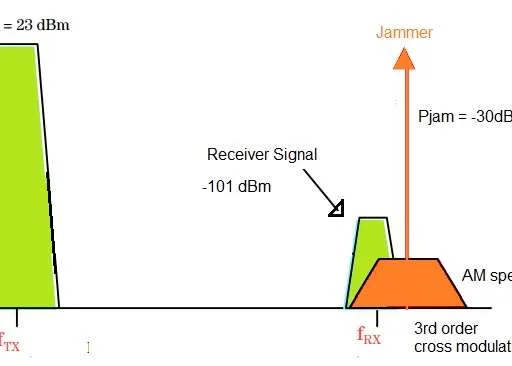
Understand the difference between cross modulation and intermodulation in RF systems, including causes, effects, measurement, and applications.
Explore cryogenic RF components, their advantages like ultra-low noise, typical applications in quantum computing and MRI, and a list of manufacturers.
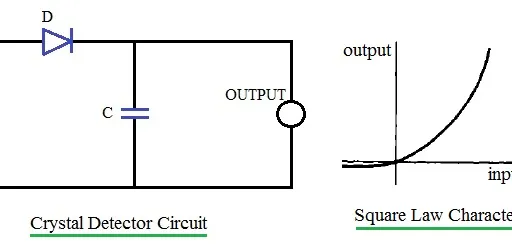
Learn about crystal detectors, their circuit configurations, characteristics, and mathematical relationships. Discover how they are used in RF and microwave applications.
Explore the distinctions between crystal filters and ceramic filters, focusing on their design, applications, and key differences in size, cost, and performance within communication receivers.
Understand the core differences between crystal oscillators and frequency synthesizers, their features, applications, and how they relate to each other in RF systems.
Explore the differences between crystals and resonators, including accuracy, stability, size, cost, and applications as clock sources in electronic circuits.
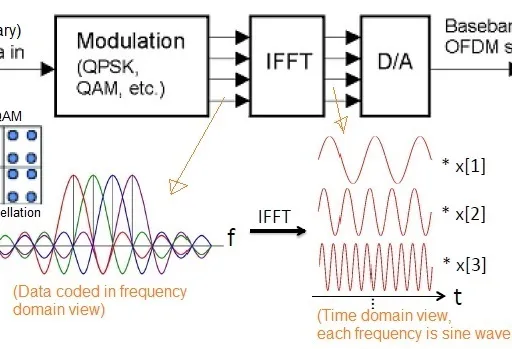
Compare CSMA vs OFDM and explore difference between CSMA and OFDM modulation techniques used in WLAN standard for Wi-Fi coverage.
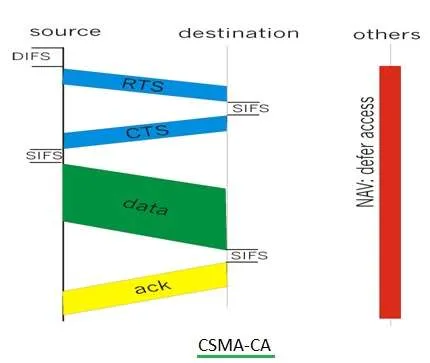
Explore the distinctions between CSMA and MACA protocols for medium access control, focusing on collision handling and addressing hidden/exposed terminal problems in wireless networks.
Advertisement