
3D LiDAR Point Coordinate Calculator | Spherical to XYZ
Advertisement
This calculator converts LiDAR spherical coordinates (range, azimuth, elevation) into Cartesian coordinates (X, Y, Z). By inputting the range to the target and the corresponding azimuth and elevation angles, you can obtain the precise 3D coordinates of the point in space, which is essential for creating accurate point clouds and performing spatial analysis in applications like robotics, mapping and autonomous navigation.
Example:
Input:
- Range (R) in meters: 10
- Azimuth angle in degrees: 30
- Elevation angle in degrees: 15
Output:
-
X coordinate in meters: 8.365
-
Y coordinate in meters: 4.830
-
Z coordinate in meters: 2.588
-
(X, Y, Z) coordinates in meters: (8.365, 4.830, 2.588)
The final 3D Coordinates (X, Y, Z) can be used to create accurate point clouds for mapping and analysis.
3D LiDAR Point Coordinate Formula (Most used in robotics and mapping)
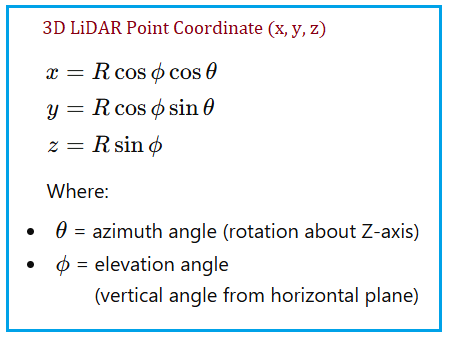
- This is the industry standard LiDAR 3D coordinate equation.
- It converts spherical coordinates (range, azimuth, elevation) to Cartesian coordinates (X, Y, Z).
Applications/Benefits of 3D LiDAR Point Coordinate Calculation
- Point Cloud Generation: Convert raw LiDAR data into 3D point clouds for mapping and visualization.
- SLAM and Navigation: Use accurate 3D coordinates for simultaneous localization and mapping and autonomous navigation in robotics and self driving cars.
- Environmental Mapping: Create detailed 3D maps of environments for applications like forestry, urban planning and archaeology.
- Obstacle Detection: Identify and locate obstacles in 3D space for collision avoidance in autonomous systems.
- 3D Modeling: Generate 3D models of objects and environments for virtual reality and simulation applications.
References for further study
- “LiDAR Data Processing and Point Cloud Generation” - An in depth article explaining how to process raw LiDAR data and convert it into 3D point clouds using spherical to Cartesian coordinate transformations.
- “3D Coordinate Systems in Robotics” - A comprehensive overview of different coordinate systems used in robotics, including the spherical to Cartesian conversion for LiDAR data.
- These formulas appear in following books and resources. These all use the same spherical to Cartesian conversion.
- Siciliano & Khatib - Springer Handbook of Robotics
- Thrun, Burgard & Fox - Probabilistic Robotics
- Corke - Robotics, Vision & Control
Advertisement









