CTC (Convolutional Turbo Code) Basics and MATLAB Implementation
Advertisement
This document provides an overview of CTC encoders and their specifications, along with relevant MATLAB code. It focuses on Convolutional Turbo Code (CTC) encoding.
The following figure illustrates the structure of a CTC encoder, including its constituent encoders.
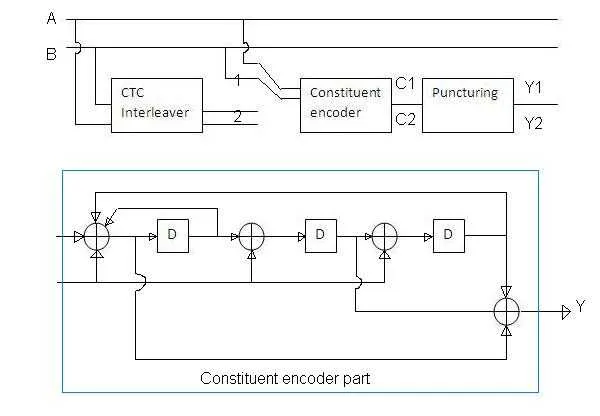 CTC encoder
CTC encoder
The CTC encoder employs a double binary circular recursive systematic convolutional code. The MATLAB code provided below implements the CTC structure depicted in the figure.
For a more general explanation of CTC encoders, refer to the Turbo encoder page, which describes the basics of Convolutional Turbo Encoding with a rate 1/3 example, commonly used for forward error correction.
A key difference between convolutional encoders and turbo encoders is that convolutional encoders do not preserve input bits, while turbo encoders do. In turbo coding, input bits are preserved and multiplexed with altered bits generated by the encoder and (interleaver + encoder) modules.
CTC Encoder MATLAB Code
function OutBits = CTCEncoder(InpBits, N, P)
CircularStateTable = [
0 6 4 2 7 1 3 5;
0 3 7 4 5 6 2 1;
0 5 3 6 2 7 1 4;
0 4 1 5 6 2 7 3;
0 2 5 7 1 3 4 6;
0 7 6 1 3 4 5 2
];
InitState = [0 0 0];
[Junk, FinalState] = CTCRSCEncoder(InpBits, N, InitState);
Ri = mod(N, 7);
Ci = FinalState(1)*4 + FinalState(2)*2 + FinalState(3);
CS = CircularStateTable(Ri+1, Ci+1);
InitState(1) = floor(CS/4);
CS = mod(CS,4);
InitState(2) = floor(CS/2);
CS = mod(CS,2);
InitState(3) = CS;
[p1, FS] = CTCRSCEncoder(InpBits, N, InitState);
if sum(FS == InitState) ~= 3
disp('P1 mismatch')
return
end
IB = CTCInterleaver(InpBits, N, P);
InitState = [0 0 0];
[Junk, FinalState] = CTCRSCEncoder(IB, N, InitState);
Ri = mod(N, 7);
Ci = FinalState(1)*4 + FinalState(2)*2 + FinalState(3);
CS = CircularStateTable(Ri+1, Ci+1);
InitState(1) = floor(CS/4);
CS = mod(CS,4);
InitState(2) = floor(CS/2);
CS = mod(CS,2);
InitState(3) = CS;
[p2, FS] = CTCRSCEncoder(IB, N, InitState);
if sum(FS == InitState) ~= 3
disp('P2 mismatch')
return
end
OutBits = zeros(6*N, 1);
for k = 0:N-1
OutBits(6*k+1) = InpBits(2*k+1);
OutBits(6*k+2) = InpBits(2*k+2);
OutBits(6*k+3) = p1(2*k+1);
OutBits(6*k+4) = p2(2*k+1);
OutBits(6*k+5) = p1(2*k+2);
OutBits(6*k+6) = p2(2*k+2);
end
end
function [ParityBits, FinState] = CTCRSCEncoder(InpBits, N, InitState)
%[ParityBits, FinState] = CTCRSCEncoder(InpBits, N, InitState)
%InitState = initial state of encoder (0 to 7) in binary
%FinState = final state of encoder (0 to 7) in binary
load 'CTCEncTable'
TNxt = CTCEncTable(:, 6:8);
TOut = CTCEncTable(:, 9:10);
ParityBits = zeros(2*N, 1);
CS = InitState;
for k = 0:N-1
A = InpBits(2*k+1);
B = InpBits(2*k+2);
m = CS(1)*16 + CS(2)*8 + CS(3)*4 + A*2 + B;
NS = TNxt(m+1, :);
Pb = TOut(m+1, :);
ParityBits(2*k+1) = Pb(1);
ParityBits(2*k+2) = Pb(2);
CS = NS;
end
FinState = NS;
end
function InterleavedBits = CTCInterleaver(InpBits, N, P)
%InterleavedBits = CTCInterleaver(InpBits, N, P)
%N - Length of input bit in pairs
%P - [p0 p1 p2 p3], interleaver parameters
InterleavedBits = zeros(2*N, 1);
xI = zeros(N, 2);
for k = 0:N-1
m = CTCGetInterleavedAddress(k, N, P);
A = InpBits(2*m+1);
B = InpBits(2*m+2);
if mod(k, 2) == 1
InterleavedBits(2*k+1) = A;
InterleavedBits(2*k+2) = B;
else
InterleavedBits(2*k+1) = B;
InterleavedBits(2*k+2) = A;
end
end
end