 RF
RFLIN Bus Communication Protocol
Advertisement
Introduction
The LIN (Local Interconnect Network) bus protocol is a cost-effective and efficient communication standard widely used in automotive and electronics systems. Designed for simple, low-speed networks, it’s an ideal solution for applications requiring minimal bandwidth and high reliability.
This guide explores the key aspects of the LIN protocol, including its features, working principles, and applications in modern automotive and electronic communication systems.
What is LIN?
CA The LIN (Local Interconnect Network) protocol is a low-cost, single-wire serial communication protocol designed for communication between components in vehicles. It was developed to complement the more robust and expensive Controller Area Network (CAN) protocol in automotive applications where high-speed communication is not necessary.
LIN is primarily used for communication between various electronic control units (ECUs) within a vehicle, such as sensors, actuators, and other devices. It’s commonly employed for applications like controlling window motors, seat heaters, mirrors, and other non-critical functions.
LIN is a master-slave protocol, where one ECU (master) initiates communication with other ECUs (slaves) on the network. LIN Protocol was designed by a consortium of European auto manufacturers. It is basically a low cost, low speed and short distance network.
This protocol is basically intended to communicate events which happen in hundredth of milliseconds
Following table mentions features of LIN protocol. The LIN bus usually operates between 9V and 18V. But the parts must survive 40 Volts on the bus. As microcontroller requires 5V for operation, it should be isolated using line driver or receiver to avoid damage and proper functioning.
| Feature | LIN protocol support |
|---|---|
| Transfer rate | 20 Kbaud |
| Communication | Bi-directional |
| Bus Length (Maximum) | 40 meters |
Key Characteristics of the LIN Protocol
-
Single Wire: LIN uses a single wire for communication, which helps reduce the cost of wiring in the vehicle.
-
Low Speed: LIN operates at relatively low speeds, typically up to 20 kbps. This is sufficient for less time-critical applications.
-
Master Slave Architecture: There is one master node that initiates communication with multiple slave nodes. The master node controls the communication schedule.
-
Time Division Multiplexing: LIN uses time division multiplexing to allocate specific time slots for each node to transmit or receive data. This ensures a predictable and deterministic communication schedule.
-
Checksum Mechanism: LIN includes a simple checksum mechanism to verify the integrity of transmitted data.
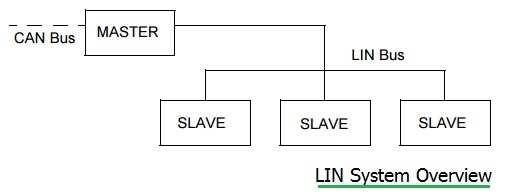
LIN protocol works as per master and slave concept. The master node controls bus by polling method to all the slave nodes. This way master informs all the slave nodes to share their data with the rest of nodes on the bus. Slave nodes only transmit when commanded by the master node, which allows bi-directional communication without further arbitration. Figure-1 depicts the LIN system overview.
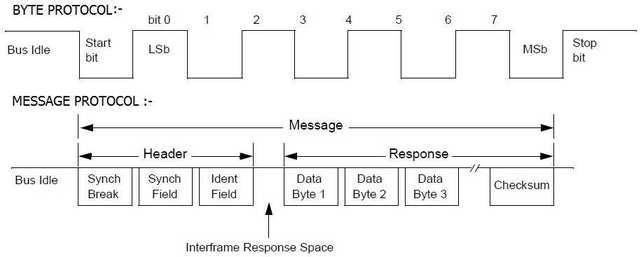
Figure-2 depicts LIN byte protocol. As shown each byte is framed by start and stop bits. Within each byte, data is transmitted Least Significant Bit(LSB) first. The start bit is the opposite of the idle state or zero and the stop bit equals the idle state. Message transfers start with the master issuing a synch break, followed by a synch field and a message field. Clock used for synchronization for the entire bus is set by transmitting a synch field at beginning of each message. Each slave node must use this synch byte to adjust their baud rate. The second byte of each message is an ident byte. This ident field informs the bus about the type of data to be followed. It also indicates which node will answer and how long the answer will be. Once the data is on the bus, any node may receive the same. Only one slave may respond to a given command. Hence communication from one Slave node to another node does not have to be directed through the Master. Hence any two slave nodes can also communicate.
Advantages of LIN Bus Protocol
The LIN (Local Interconnect Network) protocol offers several benefits, particularly in the context of automotive applications:
- Cost Effectiveness: LIN bus reduces the overall cost of wiring in vehicles.
- Simplicity: LIN is relatively simple to implement and is designed for ease of use.
- Energy Efficiency: LIN is designed to be energy-efficient.
- Deterministic Communication: LIN uses time-division multiplexing to allocate specific time slots for communication between nodes. This deterministic communication ensures that each node knows when it can transmit or receive data, providing a predictable and controlled communication schedule.
- Simplified Structure: The master-slave architecture simplifies the communication structure. This well-organized hierarchy that is suitable for many automotive applications.
- Suitable for Non-Critical Functions: LIN is typically used for non-critical functions in a vehicle, such as controlling window motors, seat heaters and other comfort-related features.
- Reliable Communication: LIN includes a checksum mechanism to verify the integrity of transmitted data which ensure the reliability of communication by detecting errors in the data.
Conclusion
The LIN bus protocol plays a crucial role in automotive and electronics communication by providing a reliable, cost-effective solution for low-speed data exchange. Its simplicity, scalability, and compatibility with other network protocols make it a preferred choice for manufacturers and engineers worldwide. By understanding its features and applications, professionals can better appreciate its significance in advancing modern technology.
There is another protocol called “CAN” which is suitable for high speed and critical applications. LIN is often used in conjunction with other communication protocols like CAN to meet the diverse communication needs of modern vehicles.
Advertisement



