 RF
RFResolver Basics: Types, Function, and Digital Conversion
Advertisement
This article provides a foundational understanding of resolvers, including their types, how they function, and their conversion to digital signals. We’ll also compare resolvers with encoders.
What is a Resolver?
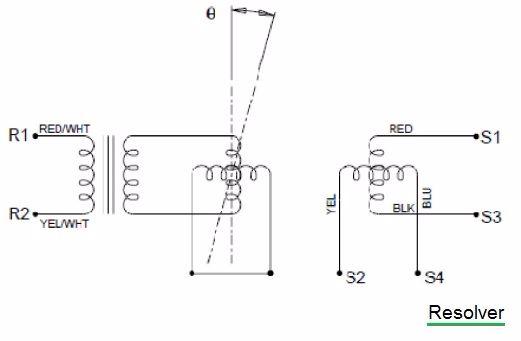
- A resolver is a rotary transformer used to measure the degree of rotation.
- It features one primary and two secondary windings, which are positioned 90 degrees out of phase with each other. This configuration is illustrated in Figure 1.
- Essentially, it’s an electromechanical device that translates mechanical motion into an electronic signal.
Key technical specifications of a resolver include:
- Input Voltage: The excitation voltage applied to the primary winding (R1-R2).
- Input Frequency: The frequency of the excitation voltage supplied to the primary winding (R1-R2).
- Transformation Ratio: The ratio of the amplitudes between the primary and secondary windings.
- Input Impedance: The impedance presented to the excitation voltage.
- Phase Shift: The phase difference (in degrees) between the signal at the primary winding (R1-R2) and the signals at the secondary windings (S3-S1 or S2-S4).
- Pole Pairs: The number of electrical rotations that occur per mechanical rotation, typically ranging from 1 to 3.
Resolver vs. Encoder
Both resolvers and encoders are electromechanical devices, but they differ in their signal transmission:
- Resolver: Transmits an analog signal.
- Encoder: Transmits a digital signal.
Resolver Types: Classical vs. Variable Reluctance
There are two primary types of resolvers: classical resolvers and variable reluctance resolvers.
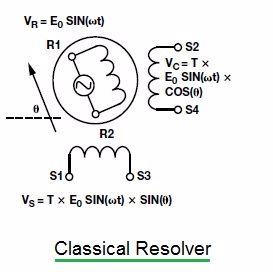
Classical Resolver
A classical resolver has one primary winding on the rotor and two secondary windings on the stator. Figure 2 (above) depicts a typical classical resolver setup.
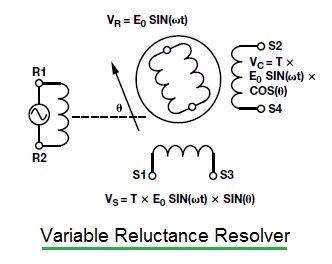
Variable Reluctance Resolver
Unlike the classical resolver, the variable reluctance resolver has no windings on the rotor. Instead, both the primary and secondary windings are located on the stator. This configuration is shown in Figure 3 (above).
Resolver to Digital Converter
-
The Resolver to Digital Converter (RDC) sits between the resolver and a microcontroller or microprocessor.
-
As mentioned, a sine wave signal is applied to the primary winding of the resolver. The electromechanical process within the resolver generates two differential outputs (sine and cosine) at the secondary windings.
-
The RDC utilizes these sine and cosine signals to determine the angular position and rotational speed of the motor shaft. Mathematically, this involves solving trigonometric equations:
The output signals can be represented as:
where and are the voltages of the two secondary windings, is the amplitude, and is the angle of rotation. The RDC essentially calculates based on these inputs.
This conversion can be implemented via dedicated chips, or using equations in software:
The precision of the calculated angle depends on the performance of the RDC and the noise in the system.
Advertisement








