 RF
RFLiDAR vs. Time of Flight (ToF) Sensors: Key Differences
Advertisement
This article compares LiDAR and Time of Flight (ToF) technologies, outlining the key differences between LiDAR and ToF sensors.
Introduction
Various depth-sensing technologies exist, including Radar, Ultrasound, LiDAR, 2D cameras with NIR illumination, Stereo vision, Structured Light, and 3D Time of Flight (ToF). These technologies are used in diverse applications, with choices dictated by performance, accuracy, cost, response time, power consumption, and range.
Typical applications include:
- Games
- 3D movies
- 3D scanning
- User interface control
- Augmented reality
- Autonomous driving
- Robotics
- Gesturing
- 3D printing
- Enemy target detection
- Premises security (monitoring surroundings)
What is LiDAR?
LiDAR, short for Light Detection and Ranging (also known as LADAR), uses a laser diode or LED to emit infrared light. The receiver employs a photo-receptor to detect reflected light rays. The time interval and phase of these reflections are used to calculate the distance to an object.
LiDAR systems use pulsed lasers to build a “point cloud” of the surface being measured. This point cloud is then used to create 3D images or maps.
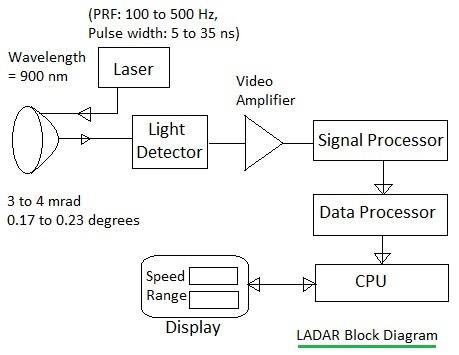
LiDAR is an optical sensing technique used to estimate the range and other parameters of a target. Different laser wavelengths are used depending on the target material. It commonly uses Near Infrared (NIR) and Visible Light (VL) frequencies to image objects.
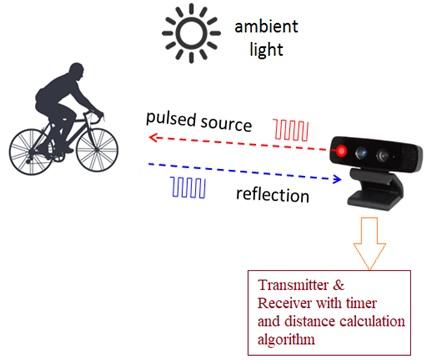
What is a Time of Flight (ToF) Sensor?
A ToF sensor illuminates a scene with modulated light and captures the reflected light. It determines distance by measuring the phase shift between the emitted light and the received reflection.
ToF applications construct depth maps using an RGB camera, based on the reflected light detected from the target object or plane. It uses a solid-state laser or LED in the near-infrared range (around 850nm). An imaging sensor receives the reflected light spectrum and converts the photonic energy into electric current.
The depth (d) can be calculated using the following formula:
d = c * ΔT / 2
Where:
- c = Speed of light (3 x 10^8 m/s)
- ΔT = Time interval between light emission and light received by the camera sensor
There are several methods to measure ΔT. The most common are the Continuous Wave (CW) method and the pulse-based method.
- CW Method: Uses a periodic modulated signal source, typically a sinusoid or square waveform, for active illumination. CW ToF sensors measure the distance at each pixel by sampling the correlation function of the received and demodulated signals.
- Pulse-based Method: The illuminating source emits a series of short light pulses. Reflected light pulses are captured in a series of short temporal windows using a sensor equipped with an electronic shutter.
LiDAR vs. Time of Flight (ToF) Sensor: Key Differences
The following table highlights the key differences between LiDAR and Time of Flight (ToF) sensor technologies:
| Comparison Parameters | LiDAR | 3D ToF Sensor |
|---|---|---|
| Operating Principle | Emits laser signals and measures the reflection from an obstacle to calculate the time and distance. | Illuminates a scene using a modulated light source and observes reflected light. Uses a solid-state laser or LED for illumination and an imaging sensor for reflected light detection. The photonic energy is converted into electrical current at the receiver. |
| Range | Higher | Medium |
| Field of View (FoV) | Medium | High |
| Resolution | Low/Medium | High |
| Accuracy of Distance Measurement | Medium | High |
| Performance of Object Classification | Lower | Higher |
| Processing Cost | Lower | Medium |
Advertisement


