 RF
RFDirect vs. Indirect Time-of-Flight (ToF) Sensors: Key Differences
Advertisement
This article compares Direct ToF (DToF) and Indirect ToF (IToF) sensors, highlighting their key differences.
Introduction:
There are three primary 3D sensing technologies: structured light, stereo vision, and Time of Flight (ToF). We’ll be focusing on distance estimation using Time of Flight methods, specifically Direct and Indirect ToF. The Time of Flight technique operates by illuminating a scene with a modulated light source and then detecting the reflected light. This light source can be either continuous wave (CW) or pulsed.
Direct ToF Sensor (DToF)
A Direct ToF sensor emits short light pulses and measures the time it takes for the echo to be received using a SPAD (single-photon avalanche diode) detector. It typically uses a vertical cavity surface emitting laser (VCSEL) with an output pulse length of approximately 0.2 to 5 nanoseconds.
This method is known for its high accuracy, even with multiple objects, and is resistant to smudges on the cover glass.
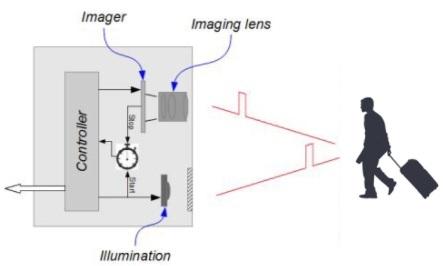
Figure 1: Direct Time of Flight (dToF) method
This technique is best suited for ranging single or few points, like a rangefinder.
Indirect ToF Sensor (IToF)
An Indirect ToF sensor illuminates the scene with intensity-modulated light. Instead of timing a pulse, it measures the phase shift between the transmitted waveform and the received waveform. This phase shift is directly proportional to the distance.
The VCSEL output is a 20 to 100 MHz modulated sine wave, as illustrated in Figure 2. These sensors often utilize standard CMOS technology.
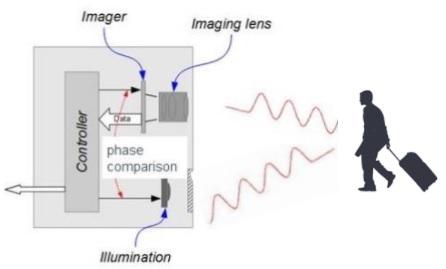
Figure 2: Indirect Time of Flight (iToF) method
This technique is particularly well-suited for 3D imaging applications.
Difference Between DToF and IToF Sensors
The following table summarizes the key differences between Direct ToF and Indirect ToF sensors:
| Comparison Parameter | Direct ToF (dToF) Sensor | Indirect ToF (iToF) Sensor |
|---|---|---|
| Principle | Uses a “stopwatch” approach to determine time delay. | Uses phase shift difference between transmitted and reflected signals. |
| Time/Frequency | Pulses with duration of 0.2 to 5 nanoseconds. | Modulation frequencies in the range of 20 to 100 MHz. |
| Detector Type | SPADs/APDs | Demodulation pixel (2 tap/4 tap), PMDs : 6 to 100 µm pixel size |
| Depth Calculation | Histogram analysis | In-pixel calculation |
| Pixel Count | Smaller | Medium to higher |
| Performance | Fast acquisition, no ambiguity | Long integration time, ambiguity |
| Dynamic Range | Digital | Analog |
| Use Case | Single/Few points ranging | 3D imaging |
For further reading, you might be interested in comparing LiDAR and Time of Flight technologies.
Advertisement








