Force Sensor vs. Strain Sensor: Key Differences Explained
Advertisement
Newton’s first law of inertia states: “Every body persists in its state of rest or of uniform motion in a straight line unless it is compelled to change that state by forces impressed on it.”
In other words, if no net force is applied to a body, its acceleration (a) will be equal to zero. To understand force sensors, let’s first understand force itself. As mentioned, when force is applied to a free body, it gives the body an acceleration in the direction of the force.
According to Newton’s research, acceleration is proportional to the acting force ‘F’ and inversely proportional to the property of a body called mass ‘m’. This can be represented as:
a = F/m
Where:
- a = acceleration (vector quantity)
- F = Force (vector quantity)
- m = mass (scalar value)
The unit of force is defined as “the force which will accelerate a 1 kg mass to an acceleration of 1 m/s2”. This unit is also referred to as the Newton.
Newton’s third law provides a relationship between two bodies: “To every action there is always opposed an equal reaction; or, the mutual actions of two bodies upon each other are always equal and directed to contrary parts.”
In engineering, the density of a medium refers to the amount of matter per unit volume.
The measurement of force is crucial in civil and mechanical engineering for various applications. Whenever pressure is measured, it requires the measurement of force. Usually, force is measured when dealing with solids, whereas pressure is measured when dealing with fluids (liquids and gases).
In simpler terms, force is considered when an action is applied to a specific spot, while pressure is measured when force is distributed over a larger area.
Force sensors are categorized into two broad classes: quantitative and qualitative.
- Quantitative Sensors: These sensors directly measure the force and represent its value in terms of an electrical signal. Examples include strain gauges and load cells.
- Qualitative Sensors: These are threshold devices. Their function is to output a signal only when the magnitude of the force exceeds a predetermined threshold level. A computer keyboard is an example of this type of force sensor. These qualitative force sensors are used in motion and position detectors. Qualitative pressure sensors include pressure-sensitive floor mats and piezoelectric cables.
The following methods are employed in force sensors to sense the force:
- By balancing the unknown force against the gravitational force of a standard mass.
- By measuring the acceleration of a known mass to which the force is applied.
- By balancing the force against an electromagnetically developed force.
- By converting the force to fluid pressure and measuring that pressure.
- By measuring the strain produced in an elastic member by the unknown force.
Methods 3, 4, and 5 are most commonly used in modern sensors.
In most sensor designs, the force is not directly converted into an electrical signal. Some intermediate steps are taken. For example, a force sensor can be developed by combining a force-to-displacement converter and a position sensor. The former can be designed using a simple coil spring whose compression displacement x is defined using the spring coefficient k and force F such that x = k * F.
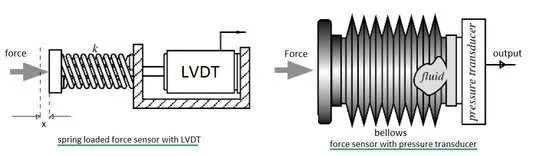
Figure 1(a) depicts a force sensor consisting of a spring and an LVDT (Linear Variable Differential Transformer) displacement sensor. The LVDT sensor produces a voltage proportional to the applied force. Another type of sensor, shown in Figure 2(b), uses a spring and a pressure sensor. The pressure sensor is combined with a fluid-filled bellows subjected to the force. The fluid-filled bellows functions as a force-to-pressure converter by distributing a localized force at its input over the sensing membrane of a pressure sensor.
Strain Gauge
One popular example of a strain sensor is the strain gauge. It is a resistive elastic sensor whose resistance is a function of the applied strain. Since all materials require some force to deform, resistance can be proportional to the applied force. This is referred to as the piezoresistive effect.
The effect is expressed using the gauge factor (Se), as mentioned in the table below for a few materials.
| Material | Strain Gauge Factor | Resistance Temperature Coefficient of Resistance |
|---|---|---|
| 57% Cu and 43% Ni | 2 | 100 |
| Platinum Alloys | 4 to 6 | 50 |
| Silicon | -100 to +150 | 200 |
For small variations in resistance (below about 2%), the resistance of the wire depends on the gauge factor as follows:
R = R0 * (1 + x)
Where:
- R0 is the resistance with no stress applied.
- x is proportional to the gauge factor.
Resistance increases with tension and decreases with compression.
Semiconductor strain gauges are quite sensitive to temperature variations; therefore, temperature compensating networks are incorporated into their design.