 RF
RFIMU Sensor Working: Accelerometer, Gyroscope & Magnetometer
Advertisement
Introduction
An Inertial Measurement Unit (IMU) is a crucial sensor in modern technology, enabling accurate motion tracking and orientation detection. It integrates three primary components: an accelerometer, a gyroscope, and a magnetometer. Each plays a unique role in capturing linear acceleration, angular velocity, and magnetic field orientation, respectively. This guide delves into how these components work together to make IMU sensors an essential part of devices like smartphones, drones, and fitness trackers.
What is IMU (Inertial Measurement Unit)?
- The single unit which houses an accelerometer and a gyroscope is known as IMU or Inertial Measurement Unit. It may also contain a magnetometer.
- It provides necessary data to maneuver aircraft, spacecraft, and watercraft, especially when GPS signals are not available.
Let us understand the sub-units of the IMU: accelerometer, gyroscope, and magnetometer.
- Accelerometer: A sensor that measures acceleration as well as gravity.
- Gyroscope: Measures the rate of rotation of the device (i.e., angular velocity) in which it is mounted.
- Magnetometer: Measures the magnetic field surrounding itself. This helps in determining its orientation relative to the magnetic field of the earth.
Accelerometer
Definition: Acceleration refers to the rate at which velocity changes over time. An accelerometer is a sensor that measures acceleration as well as gravity. Its output is in units of gravity (i.e., letter ‘g’).
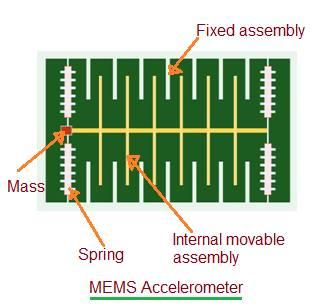
- It is used in mobile phones to determine the orientation of the phone with respect to the ground. This helps to rotate the picture or screen display appropriately for the user to view.
- Nowadays, the accelerometer is packed along with the gyroscope and magnetometer.
- Figure 1 depicts accelerometer implementation using MEMS.
Gyroscope
Definition: The device used for navigation and angular velocity measurement is known as a Gyroscope. The Gyroscope made using MEMS technology is known as a MEMS gyroscope.
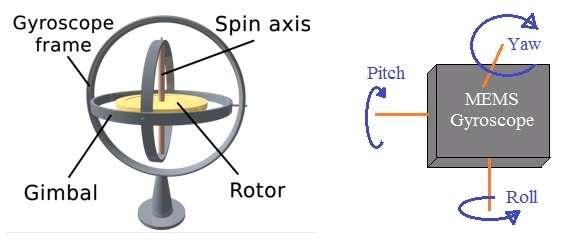
- The MEMS gyroscope uses a very small vibrating mechanism to detect changes in orientation.
- Gyroscopes can measure the rotational velocity of one, two, or three direction axes.
- A 3-axis accelerometer is used to implement a 3-axis gyroscope.
- There are various types of gyroscopes: Mechanical Gyroscope, electronic gyroscope, MEMS gyroscope, etc.
- Figure 2 depicts gyroscope implementation using MEMS.
Magnetometer
A magnetometer is a device used to measure the magnetic fields present around us. Magnetic fields are generated by current carrying conductor.
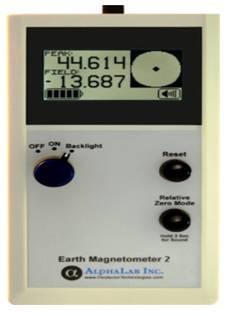
- Magnets create a magnetic field.
- Even our earth has its own magnetic field. Earth’s magnetic field strength is proportional to .
- Magnetometers are classified into various types: vector magnetometer, scalar magnetometer, Coil Magnetometer, Hall Effect Sensor Magnetometer, Magneto-resistive, Magneto-strictive, Fluxgate, Overhauser, Optically pumped Magnetometer, etc.
- Figure 3 depicts an Earth magnetometer.
Conclusion
IMU sensors, powered by accelerometers, gyroscopes, and magnetometers, have transformed how we perceive motion and orientation in various applications. From enhancing navigation in autonomous vehicles to revolutionizing gaming and fitness, their versatility is unmatched. Understanding their working principles not only highlights their importance but also opens doors to innovative applications across industries.
Advertisement






