 RF
RFInertial Navigation System (INS) Explained
Advertisement
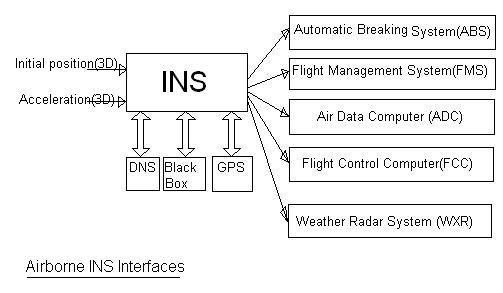
An INS, or Inertial Navigation System, is a long-range navigation aid used in avionics.
It provides the aircraft’s 3D velocity and 3D position fix. Essentially, INS is based on Dead Reckoning (DR). This means we first need to determine the aircraft’s vectorial acceleration, then integrate that value once to find the velocity, and integrate it a second time to calculate the position.
The remarkable aspect of this technology is that it’s a self-contained system, eliminating the need for ground stations to operate.
There are two main types of INS used in aircraft:
1. Stable-Platform INS (or Gimballed INS)
This type of INS isolates the gyroscopes and accelerometers from the aircraft’s angular motion. This keeps it synchronized with the Earth’s coordinate system.
The system includes 3 Gyroscopes (G):
- GROLL
- GPITCH
- GYAW
It also contains 3 movable Accelerometers (A):
- ALAT (A N-S)
- ALON (A W-E)
- A ALT
2. Strap Down INS
Unlike the Stable-Platform INS, the Strap Down INS has no moving parts. The accelerometers are directly connected to the airframe, and the gyroscopes are aligned with the aircraft’s X-Y-Z coordinate system.
This system uses three laser gyroscopes:
- G ROLL (Gx)
- G PITCH (Gy)
- G YAW (Gz)
Laser gyroscopes work by sending two laser light beams in opposite directions (clockwise and counter-clockwise).
It also contains 3 non-movable accelerometers:
- Ax
- Ay
- Az
3. Additional Parameters Provided by INS
Besides velocity and position, INS can also provide the following:
- Track to fly
- Off-track distance
- Distance between 2 points
- Storage of alternate destination positions
- Determination of true North direction
- Recalculation of Estimated Time of Arrival (ETAs)
Advantages
1. General Advantages of INS
- INS is a self-contained airborne system, meaning it doesn’t rely on external navigation sources.
- It provides real-time display of aircraft velocity and position.
- It can operate at all altitudes.
- GPS is sometimes used to augment INS, helping to correct or reduce errors.
2. Advantages of Stable-Platform INS
- It maintains alignment with the Earth’s coordinate system, even with aircraft angular motion.
- Accelerometers and gyros are protected from malfunctions due to severe maneuvers, as they’re not directly connected to the airframe.
3. Advantages of Strap Down INS
- Mechanically simpler to build.
- Laser gyros are more robust than traditional ones.
Disadvantages
1. General Disadvantages
- Drift error is approximately +/- 0.5 kts (+/- 1 Km/hr).
- Errors can arise from the non-orthogonality of accelerometers.
- Vibrations and thermal variations can cause flaws in the information data.
- INS is a relatively expensive technology.
2. Disadvantages of Stable-Platform INS
- Mechanically more complex to realize.
- Errors can be generated by non-orthogonality of gyros.
- Gyros may be susceptible to Electromagnetic Interference (EMI).
3. Disadvantages of Strap-Down INS
- Navigation accuracy is highly dependent on the aircraft’s maneuvers, due to the direct connection of accelerometers and gyros to the airframe.
- Requires more computations, as acceleration must first be converted from aircraft coordinates to Earth coordinates before performing DR to obtain velocity and position.
INS and GPS Combination
The combination of INS and GPS is often used because they complement each other. GPS can calibrate INS drift error, while INS attitude data can aid the GPS.
Advertisement





