 RF
RFDead Reckoning Navigation System (DR) Basics
Advertisement
This page describes Dead Reckoning Navigation System basics. It mentions how DR navigation system works.
What is DR Navigation?
Dead Reckoning Navigation System determines the position of a vehicle based on its heading and distance traveled, even in the absence of a satellite signal. The DR navigation system uses a gyroscope (Gyro) to estimate the heading. Later, it uses the heading along with the distance traveled to determine the position of a vehicle.
The major challenge in this type of navigation arises when the satellite signal is lost for an extended period due to long tunnels or similar blockages. In this condition, the error due to accumulated angle becomes very large, resulting in inaccurate position estimation.
How DR Navigation Works
Let’s understand how DR navigation works. The idea is to determine the location after a certain amount of time. We will assume a known position at the start. The start position is taken at a specific time. The course is being noted as per true heading or compass heading.
- A gyroscope measures the rotation rate of the vehicle in degrees/second.
- The instantaneous heading of the vehicle is calculated using the integration of the rotation rate over time.
- Distance is determined based on the speed and time of travel (some duration after which we would like to determine the position).
- Based on the initial known location (i.e., position at the beginning of the time of test) and the distance traveled as mentioned above, the exact position of the vehicle can be estimated.
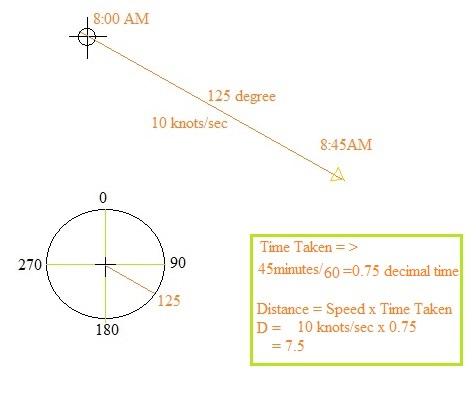
Figure 1 depicts the distance calculation.
Let’s assume the coarse given is about 125 degrees, and the position is known at the start time, i.e., 8 AM. Let’s determine the position after 45 minutes of time.
45/60 gives us 0.75 decimal time.
We know the speed of the vehicle is 10 knots/sec.
Now draw a line parallel to the coarse line (as shown in the circle), which represents 125 degrees. On this drawn line, we will get the vehicle position using the following formula:
Distance = speed x time duration
We get 7.5 knots as the distance traveled on the coarse.
Advertisement







